对于道路使用者,尤其是新手司机来说,最大挑战之一是泊车,因为将汽车驶入狭窄的泊车点通常有一定的难度,并且非常耗时。辅助系统可以帮助进行所有的泊车操作,使驾驶更加轻松:根据自动化程度的不同,数字辅助系统可完全独立地驾驶车辆,或者提供驾驶辅助功能。为此,辅助系统会检测车辆的周围环境并控制执行器以进行制动、驾驶和转向。
近场监测泊车流程
辅助系统的传感器监测近场,即紧邻车辆的周边区域。通常,我们会使用超声波传感器。这是一种位移传感器,它们能够周期性地发出短的高频声音脉冲并接收来自周围环境的反射,据此测量物体与传感器之间的距离。我们可以根据脉冲的发送和接收时间之间的差值计算距离。现代近场监测也适合下列情况:传感器需要相互比较。就其本身而言,超声波传感器和其它传感器提供相对模糊或复杂的数据。只有在将结果与其他传感器进行比较后,才能获得可靠的周围环境图像。公路上的自动驾驶车辆越来越普及,这种多传感器记录也变得愈加重要。泊车时发生碰撞的可能性很大,因此这类系统必须通过广泛的验证测试才能用于车辆。
测试时的最大灵活性
驾驶测试不能应用于所有的验证任务。我们必须对碰撞之前的许多不同的测试用例进行评估,并且必须相应地调整驾驶辅助系统的行为。测试之间具有很多差异,基于仿真的流程为此提供了足够的灵活性。然而,我们需要使用合理的环境数据,并同时激励传感器和辅助系统。这带来了一定的挑战。

选择测试系统的标准
除了其它服务外,科技公司 CATARC 还致力于验证和认证各种的泊车辅助系统,汽车制造商希望在车辆上使用这些辅助系统,以满足中国市场的需要。泊车辅助系统的不同结构对测试系统有特殊要求:
- 灵活性:提供所有必需的接口并适当地映射相关信号
- 自动化:轻松创建测试用例及其变体,并以可重现的方式进行应用
- 可用性:由于测试量大,测试系统必须保持待命状态。
- 报告生成:针对个别泊车辅助系统的详细测试报告
- 经济效率:尽管灵活性很高,但仍能确保从购置到维护运营整个过程的经济高效
根据这些要求,CATARC 积极开拓测试系统市场。

泊车测试系统
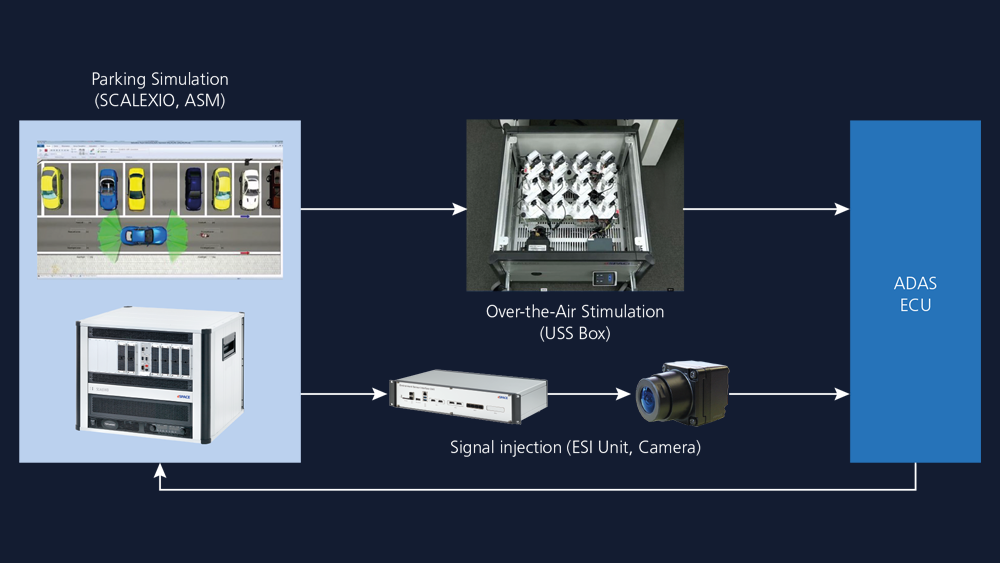
在评估各种测试系统后,CATARC 决定采用 dSPACE 的解决方案。该测试软件基于 HIL 仿真器,可将超声波和摄像头传感器集成到控制回路中。
通过仿真实现集成: 我们可以使用超声波传感器 (USS) 的 OTA 方法来实现。传感器盒包含车辆的所有超声波传感器,并为它们提供必要的工作电压和来自仿真器的信号。反射器也与该仿真器相连,其位于每个 USS 的对面。它接收来自 USS 的信号,并根据仿真计算的距离,以一定的延迟将它们发送回来。因此,超声波传感器完全通过仿真进行激励,将计算出的距离信号传输到辅助系统。如果泊车辅助系统完全由超声波传感器组成,其也可以使用这种方法进行全面的测试和验证。
通过数据馈送实现集成: HIL 仿真器也可用于配备摄像头传感器的泊车辅助系统。由于这些传感器专为全景视图而设计,并且检测角度大于 180°,因此传感器记录平面监视器的 OTA 方法并不适用。在这种情况下,仿真数据直接传输到传感器。这是借助 dSPACE 的 Environment Sensor Interface (ESI) Unit 单元实现的,该单元准备好原始传感器数据,以直接将其馈送到摄像头的成像器芯片。因此,传感器的所有处理阶段都能进行验证。我们通过仿真获得激励和馈送传感器所需的传感器数据,并同时提供。

敢于试错:实现虚拟碰撞
所有与传感器相关的数据都是从使用 ASM(Automotive Simulation Models)工具套件执行的交通仿真中获取的。ASM 可以通过交互的方式创建任意数量的场景,并进行逼真的仿真。对于泊车辅助系统,这些场景可能包括泊车位、泊车点或城市区域,其可根据需要设计。此外,还可以仿真道路使用者,包括行人以及泊车时必须检测的障碍物。
传感器可以轻松定位:它们在虚拟测试车辆内的位置可以通过图形化用户界面以直观的方式进行分配。随后会自动执行预定义的测试。在测试过程中,距离和速度等测试参数可以随时更改,直到发生虚拟碰撞,这具有很大的灵活性。因此,CATARC 的测试工程师可以生成许多测试用例,并通过改变参数确保高测试覆盖率。
此外,HIL 仿真器可以回放在驾驶测试期间记录的传感器数据。传感器盒和 ESI 单元可以将此数据提供给 USS 和摄像头,这与仿真数据完全相同。
从测试中获得的有价值成果
测试系统可快速测试新功能并对整个控制器进行验证。此外,还可以通过仿真提前评估系统中的限制条件,例如实际最小和最大距离。我们可以在驾驶过程中重复检测和记录所有异常,这很有帮助。
该测试解决方案非常适合 CATARC 的服务范围,其可轻松集成来自不同制造商的超声波传感器和 ECU ,具有很高的灵活性。一般而言,只需调整几个参数即可。
目前,CATARC 的团队正在使用该仿真器,大约 30 人。他们在接受大约三周的培训后,就能够高效地使用该系统。据他们所说,测试系统已经在日常测试中发挥关键作用。特别是在自动驾驶领域,包括代客泊车,仿真器可首先确保这些功能的安全性,然后在真正的驾驶测试中加以使用。通过使用 dSPACE 的仿真工具,我们可以逼真地仿真各种危险场景。此外,dSPACE 的工具能够实现从传感器和 ECU 到驾驶的端到端验证,帮助加快测试并简化验证任务。
更多创新、更多测试
泊车辅助系统发展进展迅速。随着车辆与其周围环境 (V2X) 之间通信系统的集成,新型传感器发挥着越来越重要的作用。因此,有希望将 V2X 验证添加到测试系统中。对于雷达传感器,可能会出现进一步的测试要求。dSPACE 的雷达测试台架已经在 CATARC 的其他测试环境中发挥了重要作用,因此也在考虑对此类测试系统进行集成。
CATARC:刘全周、李占旗、贾鹏飞
作者简介:

刘全周
刘全周是中国 CATARC 电子控制开发部主管。

李占旗
李占旗是中国 CATARC 仿真开发和系统验证小组的高级经理。

贾鹏飞
贾鹏飞是中国 CATARC 仿真开发和系统验证小组的工程师。

