超音波センサ用シミュレーションモデル
|
発表日: 2020年09月15日 |
目的
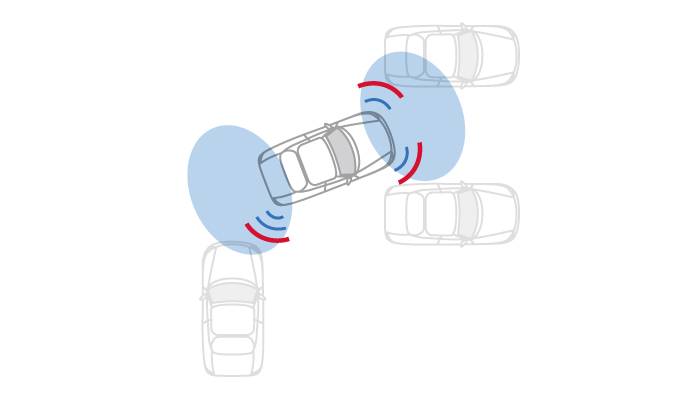
超音波センサは、2000年代初期からドライバーへの障害物距離のフィードバックの手段として、主流の乗用車で使用されてきました。この領域での開発は現在も継続され、これらのセンサは自動駐車運転操作の主要なフィードバックコンポーネントとしても使用されています。超音波センサの数量や取り付け位置、物理的形状、塗装の色、 超音波特性などが多岐にわたるため、そのテストが困難なものになっています。しかしながら、超音波センサは近接エリア監視のセンサ融合、および自動運転レベル3、4、5を達成するための情報収集で重要な役割を果たすため、徹底的にテストしないことは考えられません。
dSPACEは、超音波センサをOTA(over-the-air)でスティミュレートするテストシステム、Ultrasonic Sensor Test System(Lab)を開発しました。このシステムは、実行時に可動部品を一切必要としません。このシステムはテスト対象デバイス(DUT)に依存せず、仮想的なdSPACE ASM Ultrasonic Sensor Modelと組み合わせることができます。このモデルでは、rayデータを使用して仮想環境で障害物を検出します。
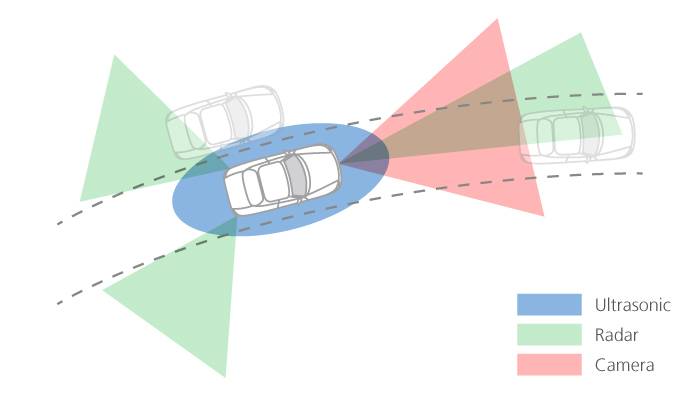
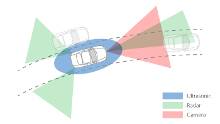
また、このシステムはカメラやレーダーなどの他のdSPACEシミュレーションオプションとも組み合わせることができます。

システム概要
Ultrasonic Sensor Test System(Lab)は通常、ASM Vehicle DynamicsおよびTrafficモジュールを実行するリアルタイムのSCALEXIOプロセッサユニット、 dSPACEトランスデューサの低レベル処理を実行する高性能FPGAボード、およびECU出力を読み出す通信ネットワークで構成されます。
DUTセンサとECUの間で傍受または操作はできません。このことは、通信プロトコルを開示する必要がなく、DUTシステムがブラックボックスと見なされることを意味します。
DUTセンサが距離計測を実行するために超音波パルスパケットを発射すると、パケットはdSPACEトランシーバによってキャプチャされ処理されます。距離に比例した遅延時間の後に、dSPACEトランシーバが超音波パルスをDUTセンサに返送します。
Ultrasonic Sensor Test System (Lab)
このテストシステムはスタンドアロンバージョンとして提供されるか、またはカスタマイズされたSCALEXIOラックシステムに統合されます。既存のdSPACE HIL(Hardware-in-the-Loop)シミュレータシャシは、Mobile Ultrasonic Sensor Test Systemを使用して拡張することができます。
ラックハウジングの外側でECUを使用する場合は、ECUとそのセンサは便宜的にラック内部信号配線から分離されます。この場合では、ECU側の配線はフィードスルーされるのみで傍受されません。システム前部にあるBNCコネクタは、電気的な点検アクセスを容易にするために提供されています。
555 x 560 x 340 mmというコンパクトなサイズでありながら、このdSPACEシステムは最大12個のセンサをサポートしています。
dSPACEセンサおよびシグナルジェネレータは無線で実際の駐車センサに接続され、センサクランプで固定されて、外部干渉から絶縁されます。dSPACEリアルタイムシステムは、Ultrasonic Sensor Test System(Lab)から分離されています。
The dSPACE sensor and signal generators are connected to the real parking sensors over the air, attached with sensor clamps, and isolated from external interferences. The dSPACE real-time system is separate from the Ultrasonic Sensor Test System (Lab).
ソフトウェアの概要
dSPACEリアルタイムシステムで実行されるソフトウェアの実装は、次の2つの部分から構成されます。SCALEXIOプロセッサユニットおよびFPGAアプリケーション。
- SCALEXIOプロセッサユニットがASM Ultrasonic Sensor Model、ASM Traffic Model、およびFPGAアプリケーションとやり取りするインターフェースブロックを実行します。
- FPGAアプリケーションには低レベルロジックが含まれ、I/Oとのインターフェースとして機能します。計測スケジュールおよびモードに関する情報は必要ありません。
プロセッサユニットとFPGAボードの間のインターフェースは、主としてFPGAアプリケーションをパラメータ化し、FPGAの低レベル信号や周波数などの計算されたウェア特性をモニタするために使用されます。
ASM Ultrasonic Sensor Modelの特長
ASM Ultrasonic Sensor Modelは、現実的なエコー計算を提供し、この計算がOTAシミュレーションで使用されます。SIL(Software-in-the-Loop)のアルゴリズムのテストと開発に同じモデルを使用することができ、異なる開発ステージ間のシームレスな移行をお客様に提供します。このモデルは高度に最適化された計算のために開発され、GPUを追加せずにSCALEXIOシステムのプロセッサユニット上で実行されます。
このセンサモデルは、現実世界の動作に可能な限り近い動作を実現するために多くの機能を提供します。以下の機能が含まれます。
現実的で容易なオブジェクトのパラメータ設定
ASM Ultrasonic Sensor Modelは、現実的で使いやすいオブジェクトパラメータ設定モデルを使用します。オブジェクトは輪郭線と高さで定義され、これにより輪郭線が押し出されます。オブジェクトには6の自由度があり、どのような使用事例にも使用することができます。
直接および間接(クロス)エコー
直接エコーの場合は、送信と受信に同じセンサが使用されます。間接エコー(しばしばクロスエコーと呼ばれる)の場合、エコーの送信と受信に異なるセンサが使用されます。間接エコーはECUに追加情報を提供するため、しばしば有効な検出が必要となります。ASM Ultrasonic Sensor Modelは、センサごとに直接および間接エコーを計算します。
ECU計測ごとに複数エコー
最新の超音波センサは、1つまたは複数のオブジェクトから反射する複数のエコーを検出し処理することができます。ASM Ultrasonic Sensor Modelは、送信サイクルごとに各オブジェクトおよび複数のオブジェクト全体で現実的なエコーを提供します。
超音波センサFPGAアプリケーションの自由度
dSPACEシステムは、現実的なエコーを生成するためにFPGAアプリケーションで4の自由度を使用します。
- 飛行時間(ToF)
超音波距離計測は、超音波の移動時間に基づいています。超音波が行って戻るのにかかる時間は距離に比例します。環境条件、特に温度が空中での超音波の速度に影響し、ダイナミックモデルでの距離計算(シミュレーション)で、または恒温槽を使用(物理)して、考慮することができます。 - 振幅
障害物の位置、角度、および特性に応じて、計測エネルギーの一部が跳ね返って戻り、一部が吸収または別の方向に跳ね返ります。生成されたエコーの振幅を操作可能であることにより、現実的な動作を提供します。 - 周波数
FPGAアプリケーションは、一般的な自動車用途での固定および変調周波数をサポートしています。 - パルス数
送信される計測波のパルス数を変更でき、この特性をFPGAアプリケーションに応じて利用できます。
周波数とパルス数は、実行中の直接操作では利用できない場合があります。
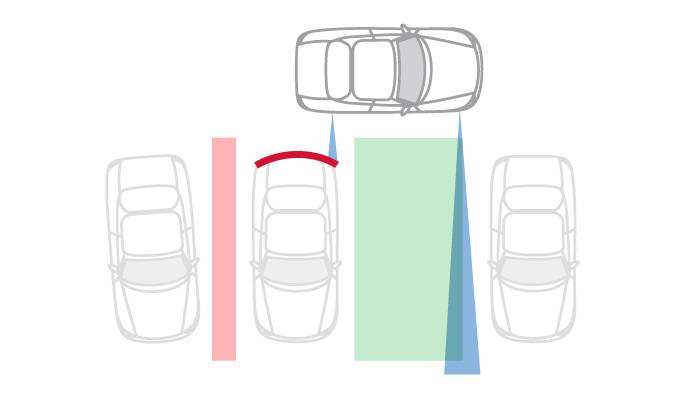
適用例:駐車スペース測定(PSM)
Ultrasonic Sensor Test System(Lab)およびASM Ultrasonic Sensor Modelシステムの多くの用途の1つとして、駐車スペース測定(PSM)システムの妥当性確認があります。これらのシステムは、縦方向または横方向の駐車スペースの幅を計測し、駐車運転操作を開始します。そのようなシナリオは、dSPACE ModelDeskを使用してパラメータ設定し、dSPACE MotionDeskおよびdSPACE ControlDeskを使用してリアルタイムでビジュアル表示することができます。Ultrasonic Sensor Test System(Lab)は、モデルから計算済みのエコーを受信し、DUT超音波センサをスティミュレートします。
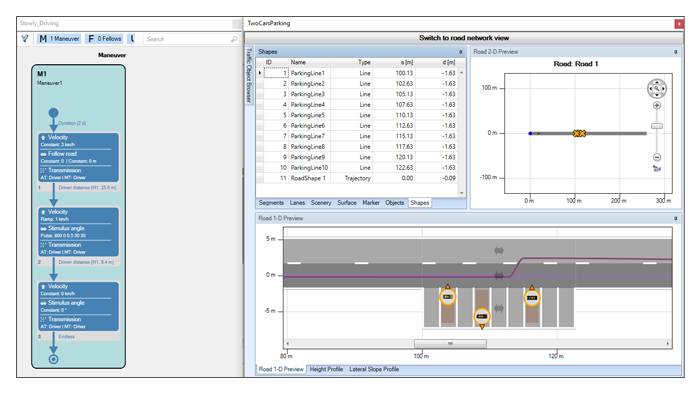



テスト対象デバイスからの距離計測がトリガされると、dSPACEセンサは周波数や振幅などの波形の特性を分析します。それと同時に、タイマが計時を開始し、ASM Ultrasonic Sensor Modelによって計算されたエコー距離に比例した飛行時間に達すると、dSPACEシグナルジェネレータが特性を緊密に一致するエコー信号をトリガします。
利点
dSPACE Ultrasonic Sensor Test System(Lab)とASM Ultrasonic Sensor Modelにより、正確で再現可能なシミュレーションおよびテストを数に制限なく無線で実行することができます。ASM Ultrasonic Sensor ModelをdSPACEツールチェーンに統合することにより、容易で直感的なシナリオのパラメータ設定と鮮明なビジュアル表示をMotionDeskで実行することができます。Ultrasonic Sensor Test System(Lab)は、実行時にライン傍受または可動部品を使用せずに実際のパーキングECUと超音波センサのテストソリューションを提供し、既存のシステムに容易に統合することができます。このテストシステムは、スタンドアロンバージョンまたはフルサイズシステムの一部としてコンパクトなサイズで提供されます。システムは、カメラ、LiDAR、およびレーダーなどのADAS/ADタスクの融合のための他のdSPACEセンサシミュレーションオプションによって拡張することができます。
最新の技術開発動向をつかんで、イノベーションを加速。
メールマガジンの購読希望・変更/配信停止手続き