データリプレイテストによる認知およびセンサ融合ソフトウェアの各機能とバーチャルECUの妥当性確認

- 実際の記録データでセンサフュージョンおよび認知コンポーネントをテスト
- Linux Dockerコンテナを使用した高性能なクラウド対応ソリューション
- 幅広いフレームワーク(ROS、ADTF、AUTOSARなど)での柔軟な統合
- クローズドループおよびデータリプレイテスト向けの相互運用可能なテスト対象システム(SUT)インターフェース
タスク
さまざまなサプライヤのベンチマーク評価、認知ソフトウェア機能の妥当性確認、および回帰テストは、すべて個々のソフトウェア開発フェーズで効率的かつ幅広い規模で実施しなければなりません。ROS、RTMapsなどのマルチセンサ開発フレームワークを使用したソフトウェア開発の早期の段階でも、その後にAUTOSARベースで量産用バーチャルECUを実装する段階でも、これらの環境認識およびセンサフュージョンソフトウェアコンポーネントの欠陥を分析したり、デバッグやテストを行う場合には、あらかじめ決められたスケジューリングに基づいて確実に実行することができるデータリプレイソリューションが極めて重要となります。
課題
堅牢なデータリプレイソフトウェア(SIL)ソリューションを構築するうえでは、記録したデータを調整してテスト対象システム(SUT)のインターフェースに適合させること、および該当するすべてのソフトウェアスタックレイヤーを使用してすべてのフェーズでSUTを現実的にシミュレートすること、さらには異種のデータソースおよびデータストリームからSUTにあらかじめ決められたスケジュールで確実にデータを入力することが課題となります。また、高いモジュール性、スケーラビリティ、および効率性でCPU/GPUリソースを使用できるようにすることも必要です。
解決策
テストを実行する際のスケーラビリティを確保し、数千に及ぶテストインスタンスを実行する機能は、dSPACEデータリプレイソフトウェアソリューションを使用することで達成できる大きな利点です。また、使用するすべてのコンポーネントはLinux Dockerにコンテナ化されるため、あらゆるクラウドベースのテストフレームワークで高いパフォーマンスを発揮し、容易な拡張も可能になります。
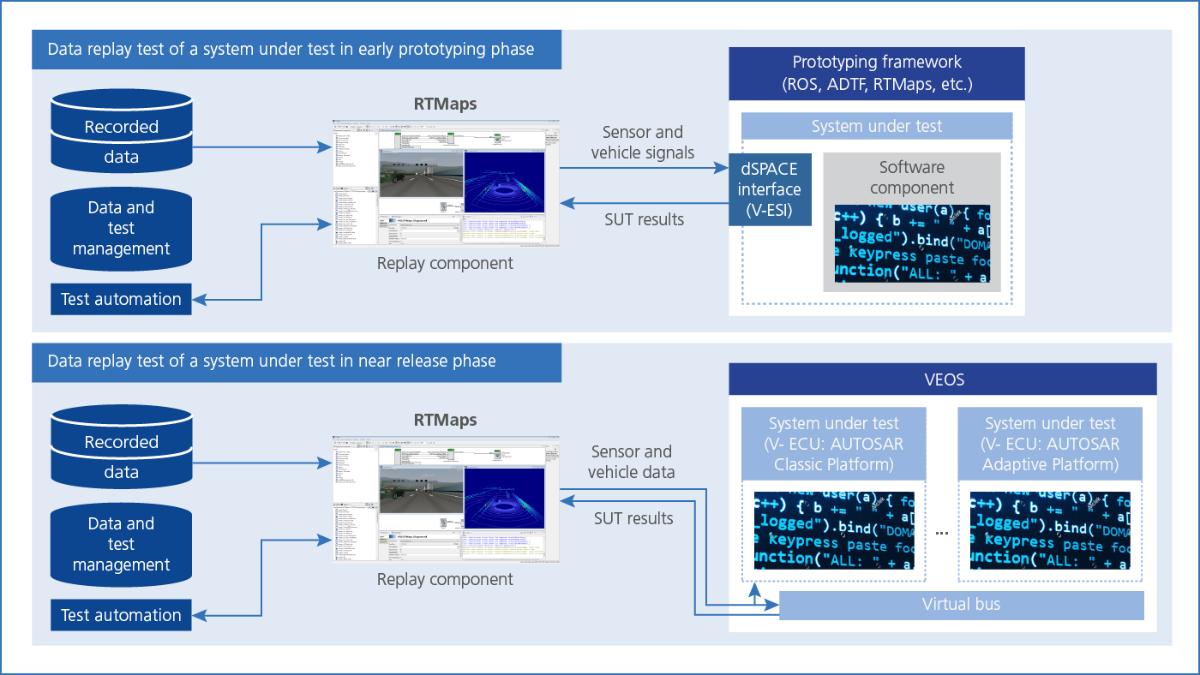
Intempora社のマルチセンサアプリケーション向け開発フレームワークであるRTMapsでは、総合的な2Dおよび3Dのビジュアル表示機能に加え、MDF4、rosbag、DATファイルなどの幅広いファイル形式で記録されたデータの同期ストリーム再生をサポートしています。これはデバッグや欠陥分析の際に有用です。
RTMapsでは、「可能な限り高速」モードでデータを再生できます。これにより、データロスのないリアルタイム以上に高速な実行と高パフォーマンスが保証されます。dSPACEの統合およびシミュレーションプラットフォームであるVEOSは、AUTOSAR AdaptiveおよびClassicなど、バーチャルECUシミュレーションに関連するすべての規格をサポートしています。また、CAN/CAN FDやEthernetなどのバスを現実的にシミュレートすることもできるため、ターゲットに組み込む前の段階でも、セキュリティ機能を含むソフトウェアスタック全体を高精度でテストすることができます。
クローズドループおよびデータリプレイテストでは、すべてのテスト対象システム(SUT)インターフェースの相互運用が可能です。また、インターフェースおよびソフトウェアコンポーネントはすべてソフトウェア(VEOS)およびハードウェア(SCALEXIO)プラットフォームで再利用できるため、データリプレイソフトウェア(SIL)ソリューションおよびハードウェア(HIL)ソリューション間のシームレスな移行も保証されます。
最新の技術開発動向をつかんで、イノベーションを加速。
メールマガジンの購読希望・変更/配信停止手続き