开发人员面临的一项新挑战是如何验证能通过控制系统做出独立决策的车辆。通过将传统的HIL技术与传感器真实环境仿真相结合,ZF成功地解决了这一问题,并创建了专门的测试系统。此测试系统以dSPACE工具链为基础。
传统人工驾驶车辆的开发和验证需要耗费大量时间和精力的同时,还需要满足成本和交付时间需求。尤其是始终需要达到成本和时间目标,如果要让自动驾驶车辆上路,则对质量、效率和安全方面提出了更高的要求。开发阶段随之变得复杂,需要使用更为精益的方法和工具链来克服。毕竟,不仅要成功地让具备自动驾驶功能的车辆上路,还要能在任何天气、交通或能见度条件下安全地应用这些功能。
自动驾驶技术平台
ZF正在努力为自动驾驶新能源汽车开发技术平台。此举强调了ZF作为自动驾驶系统架构师所拥有的专业知识。为此,该科技集团拥有专业的专家网络,特别是在确定和处理环境和传感器数据方面。该项目也证明了ZF ProAI超级计算机的性能和实用性,一年前ZF和NVIDIA联手推出了这款计算机。计算机相当于车辆的中央控制单元。其目标是打造一个可扩展的系统架构,可以转移到任何车辆上,具体取决于用途、可用的硬件设备和预期的自动化水平。
设计自动驾驶系统
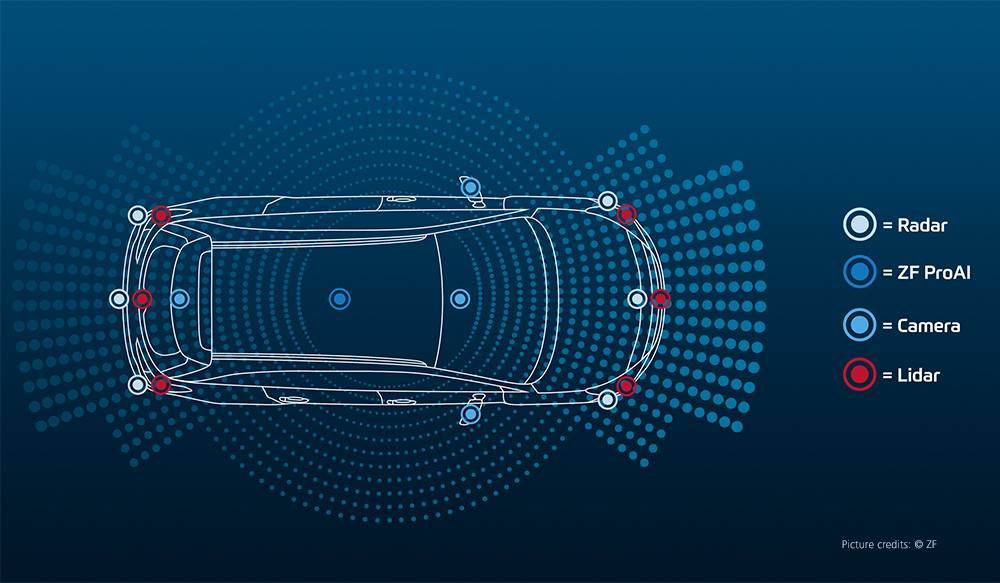
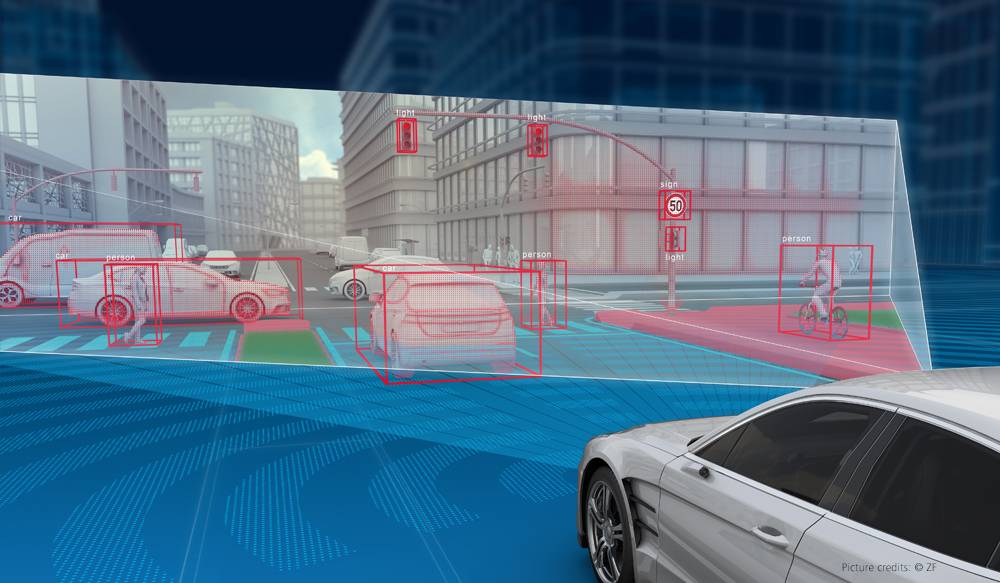
车辆配备6个激光雷达传感器、7个雷达传感器和12个摄像头传感器,用于环境探测。全球卫星导航系统(GNSS)可保证确定精确的位置。所有传感器数据在ZF ProAI中央控制单元中合并。控制单元使用感知、对象识别和数据融合的典型步骤,预处理和评估数据。还会计算驾驶策略。经过上述推导,便生成了执行器(转向、动力传动系统和制动系统)的控制信号。部分基于人工智能(AI)的算法对传感器数据进行分析。最重要的是,AI软件加快了数据分析,提高了对象识别精度。其目标是利用丰富的数据来识别交通状况中反复出现的模式,例如行人过马路。
验证概念
电子控制单元(ECU)的一个重要验证步骤是集成测试,其中涉及测试与车辆所有传感器、执行器和电气/电子(E/E)架构相结合的ECU。这个全面的认识对于充分验证所有驾驶功能(包括相关组件(传感器、执行器))和评估车辆行为非常重要。硬件在环(HIL)仿真是非常成熟的集成测试方法。因此,该开发项目包含的一个验证步骤采用了HIL测试解决方案。

HIL仿真器概念
ZF与dSPACE携手,开发了HIL仿真器概念。该仿真器基于SCALEXIO技术,用来仿真整个车辆,其中包括转向系统、制动器、电力驱动装置、车辆动力学和所有传感器。作为ECU输入,该仿真器会传输所有传感器信号。在输出端,它提供Restbus仿真,以及车辆执行器的HIL操作所需的I/O。为确保仿真的真实感,运用了dSPACE车辆仿真模型(ASM)工具套件来计算车辆和车辆动力学,就传感器和车辆而言是实时进行的。由于AI系统本身没有任何“坚实的”实时属性和线性相依关系,这就带来了一个挑战。因此,在传感器和执行器的同步仿真器之间“插入”了AI控制单元,从而像车辆在真实状况下一样运行。
传感器模拟
ZF ProAI控制单元主要用来直接处理传感器的所有原始数据。此外,还将传感器数据作为对象列表读入。对象列表作为周围交通的地面实况仿真的一部分,由ASM交通模型提供。对于原始数据,必须尽量逼真地仿真所有传感器。

高度准确的传感器环境仿真
传感器原始数据的生成需要模型来计算基于指定测试场景的传感器环境,并精确地仿真。dSPACE工具链中的物理雷达、激光雷达和摄像头模型用来实现此目的。这些高精度和高分辨率模型会计算环境和传感器(包括传感器前端)之间的传输路径。雷达和激光雷达模型的示踪器会渲染从发射器到接收器单元的整个传输路径,并支持多径传播。几百万束光束平行发射,具体数字取决于相应的3-D场景。这两种模型基于物理行为来计算复杂对象的反射和漫射。也可以为多径传播指定“跳跃”次数。激光雷达模型用于闪光传感器和扫描传感器。摄像头模型可以适应不同的镜头类型和光学效果,例如色差或镜头上的灰尘。所有模型都非常复杂,必须在图形处理器(GPU)上计算模型组件,才能满足实时需求。为此,采用了配备NVIDIA P6000的传感器仿真PC,无缝集成到dSPACE的实时系统中。


生成测试场景
自动驾驶车辆测试最重要的部分是生成适合的场景,能够用来可靠地测试和验证自动驾驶功能。为此,采用了场景编辑器。它可以使用便利的图形化方法,创建复杂的周围交通状况。这些场景包括自主车辆(被测车辆,包括其传感器)的动作、周围交通的动作和基础设施(道路、交通标志、路侧建筑物等)。由此打造了一个逼真的虚拟3D世界,它会被车辆传感器捕捉。灵活的设置支持各种各样的测试,包括精确实施标准化Euro NCAP规范,以及城市地区各种有条不紊的复杂场景。3D环境(包括车辆的3D对象)以及传感器环境模型用ASM来实时仿真。道路使用者的轨迹用ASM交通模型来仿真。

The two HIL racks contain all components for sensor simulation:
SCALEXIO real-time platform, Sensor Simulation PCs, and ESI Units.
The ZF ProAI control unit to be tested is located in the left-hand rack.
The simulator for the actuators is not shown.


ZF ProAI
ZF ProAI控制单元为实现自动驾驶的功能提供高计算能力和人工智能(AI)。它利用一个非常强大的可扩展NVIDIA平台,处理来自摄像头、激光雷达、雷达和超声传感器的信号。它会实时了解车辆周围的情况,并通过深度学习积累经验。
优点
- 实现人工智能
- 计算能力高达150 TeraOPS(=每秒运算150万亿次),具体取决于模型
- 为实现自动化和自动驾驶的功能做好准备
- 高度可伸缩接口和功能
验证自动驾驶车辆
这里介绍的HIL仿真器网络可在各种条件下帮助开发人员分析虚拟化技术平台的整体车辆行为,这些条件对进一步开发至关重要。其中包括所交付的第一辆车需要完全自主找路的测试区域场景。仿真器会测试车辆的安全驾驶能力,即使在雨雪天气或薄冰路面等情况下发生不可预见的事件时。还增加了其他典型的HIL测试方法,例如E/E系统发生故障,即断线、短路或总线系统错误。这些测试目录非常全面,而且在不断扩充,确保关乎安全的自动驾驶系统在功能方面经过有效验证。
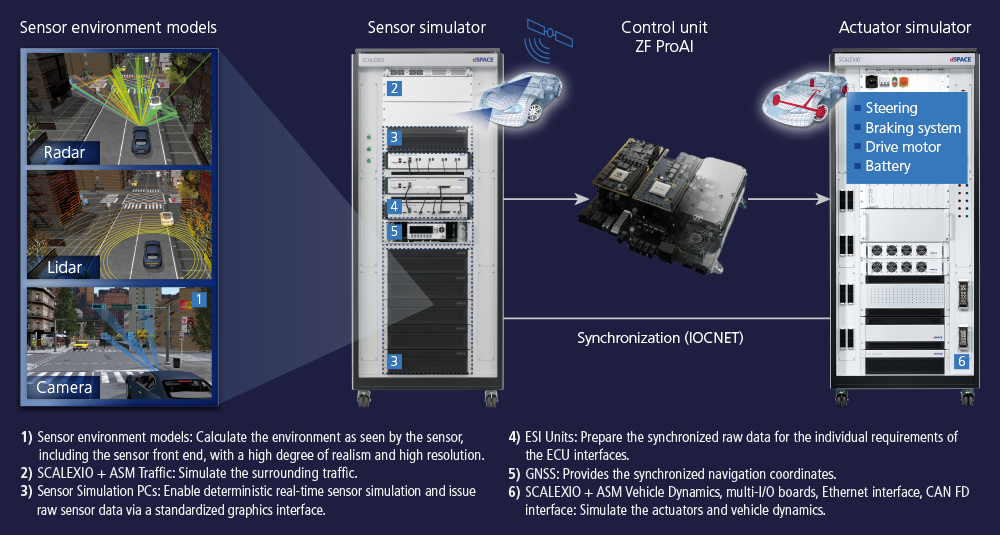
The HIL simulator synchronously generates the surrounding environment of the radar, lidar, and camera sensors, including their front end, in real time and subsequently provides it to the ZF ProAI control unit. ZF ProAI controls the simulated actuators according to the driving strategy.

深度学习
ZF工程师利用仿真器来“训练”车辆的各种驾驶功能。尤其注重城市交通状况,例如在人行横道与行人和一群行人交互、碰撞评估,以及在红绿灯和环岛的场景。与高速公路或乡村公路驾驶相比,在城市地区驾驶要全面了解当前的交通状况,为计算机控制的车辆进行适当操作提供依据,这要难很多。

概览
任务
- 验证自动驾驶、电动技术平台
- 测试基于人工智能的车辆导引
挑战
- 实时仿真所有传感器
- 创建传感器环境(3D环境)的传感器真实实时仿真
- 仿真整个车辆在真实交通状况中的行为
解决方案
- 建立一个实时平台,用于雷达、激光雷达、摄像头传感器高精度仿真
- 实时仿真交通、车辆动力学和电驱动
- 使用可轻松调整的场景,在虚拟3D环境中进行测试
作者简介:

Oliver Maschmann
Oliver Maschmann is project manager at ZF in Friedrichshafen and responsible for the setup and operation of the HIL test benches for full vehicle integration testing.




