如何利用人工智能解决处理链中一些特别具有挑战性的自动驾驶任务,例如从感知和情况分析到行为规划的一系列问题?科技公司 Bosch 展示了如何使用 understand.ai 带注释的传感器数据有效地训练神经网络。
创新的出行概念(例如高度自动化或自动驾驶)对技术系统的安全性和可靠性提出了众多要求。在为自动驾驶 (SAE Level 5) 高效开发可靠的控制系统时,我们会使用相关的技术。因此,我们需要在基于控制的传统方法与经过训练的神经网络之间进行选择。在快速图形处理单元 (GPU) 上执行时,神经网络特别适合处理由高分辨率传感器产生的海量数据。
确定 AI 应用领域
在此背景下,第一步是确定人工智能 (AI) 在整个处理链(从感知到情景分析再到行为规划)中的潜在应用领域。此外,我们必须对机器学习领域中特别有前景的方法进行评估。Bosch 正在开展一个项目,旨在调查 AI 应用领域和学习方法。该项目的重点是多模态感知,即使用视频、雷达和激光雷达传感器的合并数据来感知车辆的环境。对机器学习中特别可行的方法进行评估则正是该项目的起点。
建立具有高度多样性的数据集
车载传感器的原始数据(在实际驾驶过程中记录的数据)用作训练数据。用于记录的交通环境必须具有高度的多样性(例如需要包含公路、乡村道路、市区、交通对象、交通场景等)。在此情况下,我们需要通过定义理想的路线类型和特征以及路线类别,这将发挥很大的作用。对于实际驾驶,则选择与定义匹配且涵盖所有定义类别的路线轨迹。

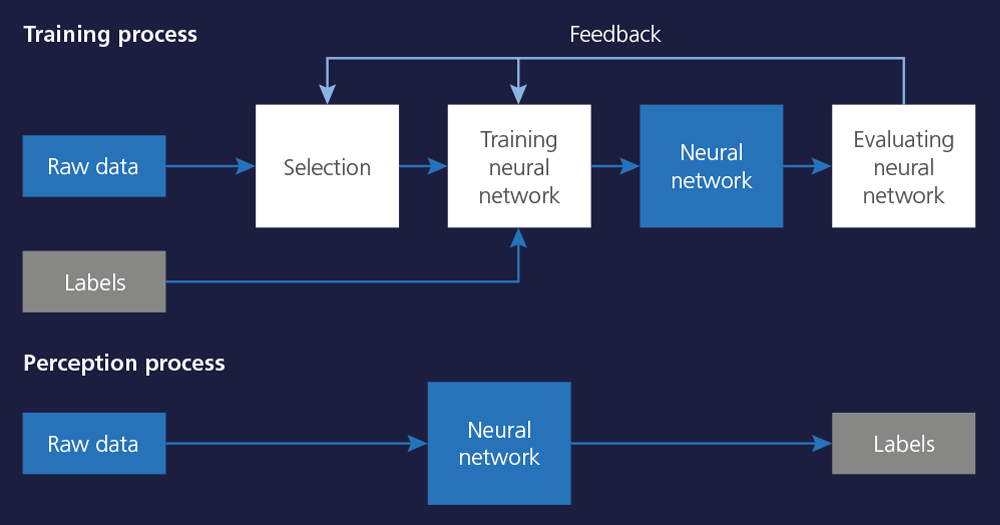
通过监督式学习训练神经网络
与人类大脑一样,神经网络也通过正例和反例进行学习:即保留可实现正确结果的路径,并丢弃会导致错误结果的路径。我们需要使用任务和解决方案来确定正确的结果。在自动驾驶系统中,这些任务通常是原始传感器数据,而解决方案则是检测到的对象。这种方法称为监督式学习。在上一步中,我们以参考数据(原始数据加上标签/标注)的形式进行标记(标签/标注),以获得解决方案。
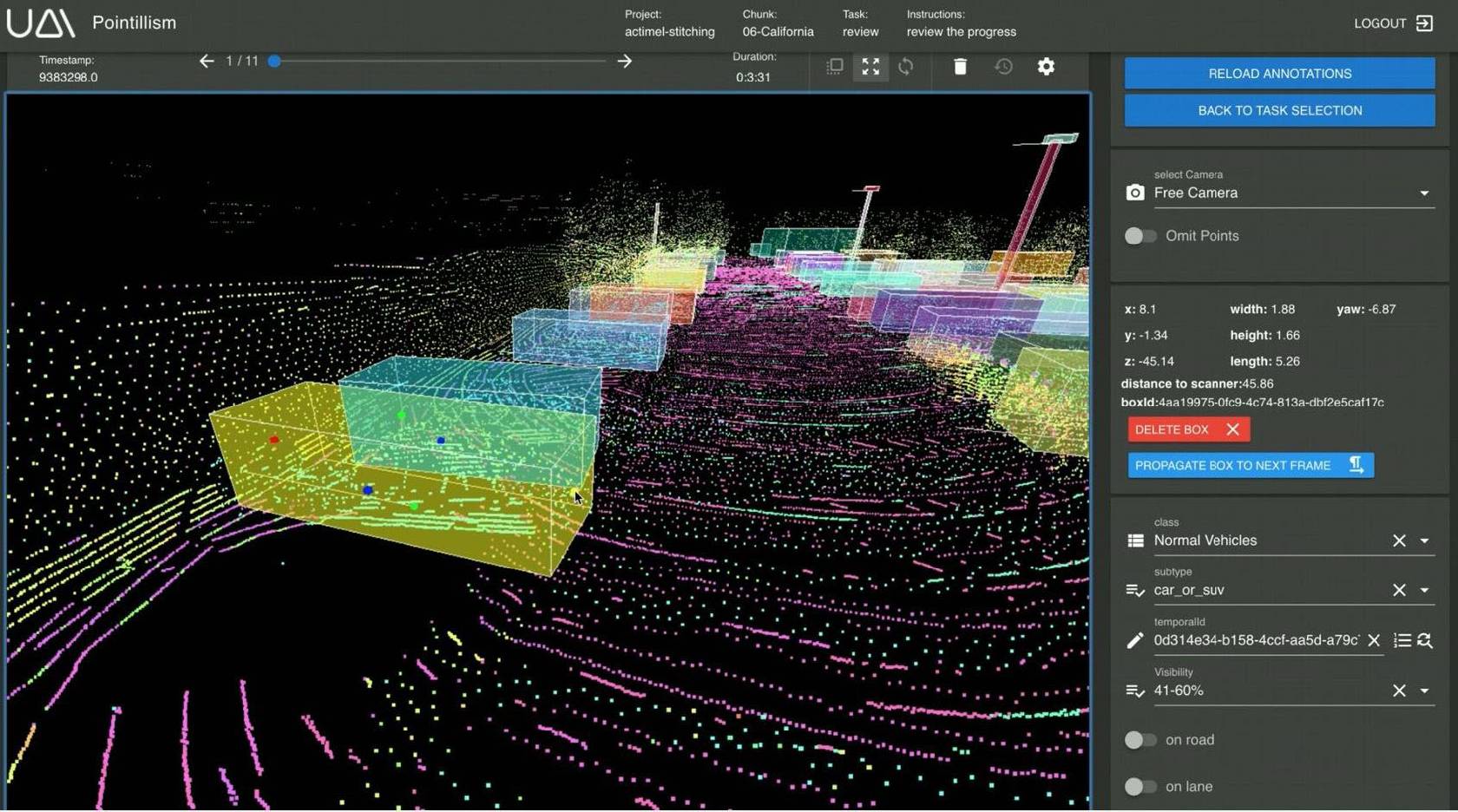
激光雷达数据的 3D 标注
我们使用激光雷达传感器产生的数据进行标注。这些对象 在激光雷达的 3D 点云中标有高精度边界框 。摄像头传感器数据用于合理性检查。经证明,通过迭代方法,我们可以成功实现既定的质量目标。在该方法中,将会对临时结果进行审查,并在反馈循环中与 understand.ai 一起判定。反馈循环和持续的需求求精有助于确保尽早且持续地达到所需的质量水平。

标注过程中的特殊挑战
标注的过程中会有许多特殊挑战,例如区分轿车和货车,或者检测带有顶棚或自行车架的车辆。专业知识和强大的工具在这些复杂任务中起着重要的作用。通过基于 web 和 AI 的对象检测和预测技术,understand.ai 能够识别边界案例并提供先进成熟的解决方案。
通过标注传感器数据进行监督式学习
我们通过标注数据来确定 AI 的潜在应用领域。我们还根据特定应用来训练网络,然后对其行为和性能进行评估。训练可能需要数天或数周的时间,具体取决于网络深度和数据量。训练流程获得成功的前提条件是配备协调良好的 IT 基础设施,其必须具有基于高性能 GPU 的计算机集群。

结果和精度
高度精确的标注是监督式学习不可或缺的先决条件,因为参考数据的质量决定了 AI 随后明确识别对象的能力。understand.ai 已实现了符合预期质量和指定要求的标注。但是必须指出,虽然标注对这种复杂的任务很有效,但并不完美。与其它开发领域一样,标注需要经过一段持续的学习过程,在这一过程中,需要不断调整和优化各种流程和工具,以达到尽可能高的质量。只有具备成熟的流程、强大的工具和高效的反馈循环之后,才能获得理想的结果。标注领域的专家们具有丰富的经验和专业知识,这对于获得经济高效的方法而言非常宝贵。
展望:标注全景环视数据
我们针对 360°环境探测规划了一项新的测量活动。在该活动中,我们使用摄像头、激光雷达和雷达传感器,并以高分辨率记录车辆环境。对于数据量、同步处理和合并数据的标注来说,这是一项新的挑战。understand.ai和Bosch 的专家目前正在讨论该项目的后续步骤。


