실시간 인터페이스(RTI)
dSPACE 하드웨어에서 모델을 실행하기 위한 구현 소프트웨어
RTI를 사용하면 실제 설계 프로세스에 완전히 집중하고 설계 반복을 빠르게 수행할 수 있습니다. 실시간 하드웨어에서 Simulink 및 Stateflow 모델을 원활하고 자동으로 구현하기 위해 C 코드 생성기 Simulink Coder™(이전의 Real-Time Workshop ® )를 확장합니다.
- dSPACE 하드웨어에서 MATLAB ® /Simulink ® /Stateflow ® 모델 구현
- 자동 코드 생성
- 포괄적인 Simulink 블록 라이브러리를 통한 그래픽 I/O 구성

적용 분야
신속한 제어 프로토타이핑을 수행하든 HIL(hardware-in-the-loop) 시뮬레이션을 수행하든 상관없이 실시간 인터페이스(RTI)는 dSPACE 하드웨어와 MathWorks ® 의 개발 소프트웨어 MATLAB/Simulink/Stateflow 사이의 링크입니다.
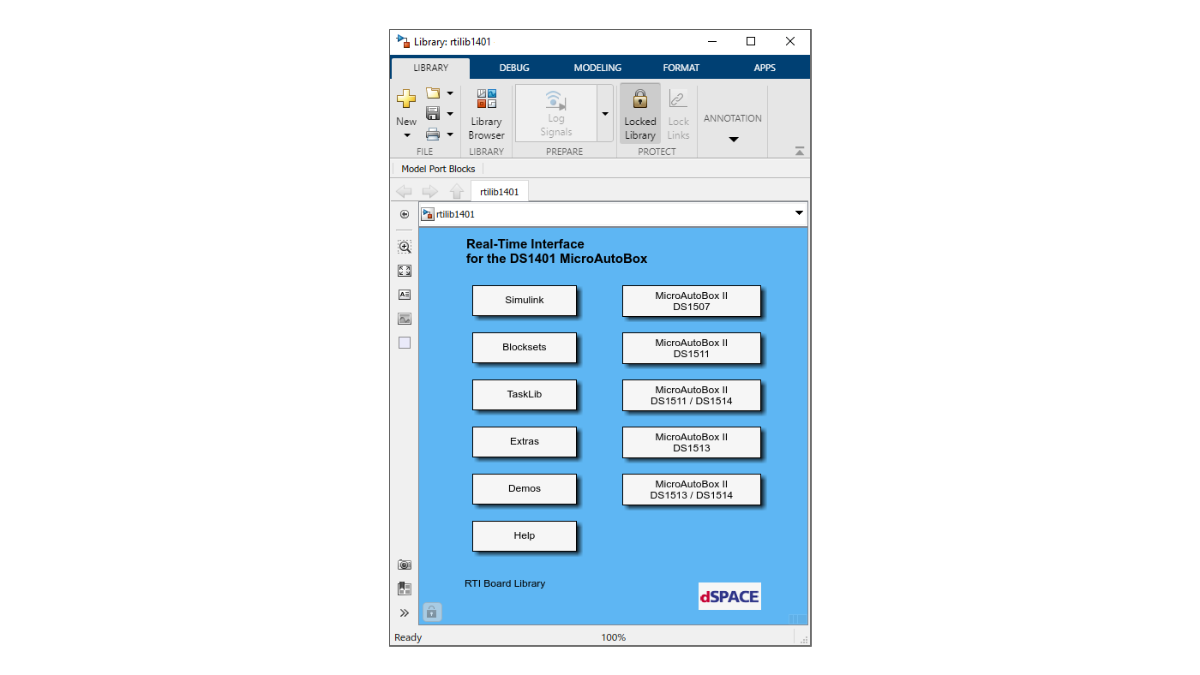
RTI 작업
모델을 dSPACE I/O 보드에 연결하려면 RTI 블록 라이브러리에서 I/O 모듈을 끌어다 놓은 다음 Simulink 블록에 연결하기만 하면 됩니다. 매개변수화와 같은 모든 설정은 해당 블록을 클릭하여 사용할 수 있습니다. Simulink Coder™(이전의 Real-Time Workshop ® )는 모델 코드를 생성하는 반면 RTI는 Simulink 모델에서 dSPACE 시스템의 I/O 기능을 구현하는 블록을 제공하여 실시간 애플리케이션을 위한 모델을 준비합니다. 실시간 모델은 한 줄의 코드도 작성할 필요 없이 실시간 하드웨어에서 자동으로 컴파일, 다운로드 및 시작됩니다. 구성하는 동안 RTI의 안내를 받게 됩니다. RTI는 일관성 검사를 제공하므로 빌드 프로세스 전이나 도중에 잠재적 오류를 식별하고 수정할 수 있습니다.
포괄적인 기능
RTI는 모든 종류의 연속 시간, 이산 시간 및 다중 속도 시스템을 처리합니다. I/O 하드웨어에 따라 동일한 I/O 보드의 다른 채널들을 다른 샘플 속도로 사용할 수 있으며 다른 하위 시스템에서도 사용할 수 있습니다. RTI는 비동기식 이벤트를 지원하며 인터럽트 구동 하위 시스템을 실행하기 위한 작업 우선 순위 및 작업 오버런 전략을 설정할 수 있도록 합니다. 또한 시간 트리거 작업 및 시간표를 지원하므로 연결된 트리거 이벤트와 관련하여 가변적이거나 미리 정의된 지연 시간으로 작업 및 작업 그룹을 구현할 수 있습니다. 이렇게 하면 모델의 작업 처리가 매우 유연해집니다. 또한 RTI는 채널의 이중 사용 또는 부적절한 사용을 방지하는 데 도움이 되는 검사를 제공합니다.
주요 이점
RTI를 사용하면 실제 설계 프로세스에 완전히 집중하고 설계 반복을 빠르게 수행할 수 있습니다. 실시간 하드웨어에서 Simulink 및 Stateflow 모델을 원활하고 자동으로 구현하기 위해 C 코드 생성기 Simulink Coder™(이전의 Real-Time Workshop ® )를 확장합니다. 구현 시간이 대폭 단축됩니다. RTI는 하드웨어 구성을 안내하고 매개변수화 오류를 방지하기 위해 자동 일관성 검사를 제공합니다. 유연성을 극대화하기 위해 각 RTI 버전은 여러 MATLAB 릴리스를 지원합니다(www.dspace.com/go/Compatibility 참조). 최신 버전의 RTI를 사용하면 대부분의 이전 MATLAB 및 RTI 릴리스의 모델이 자동으로 마이그레이션됩니다.
모델 설계
이 예에서, 하드 디스크 드라이브용 위치 결정 시스템의 폐쇄 제어 루프가 블록 다이어그램에 표시되어 있습니다. 컨트롤러와 제어 시스템의 모델은 모두 MATLAB/Simulink 개발 환경에서 설계되었습니다.
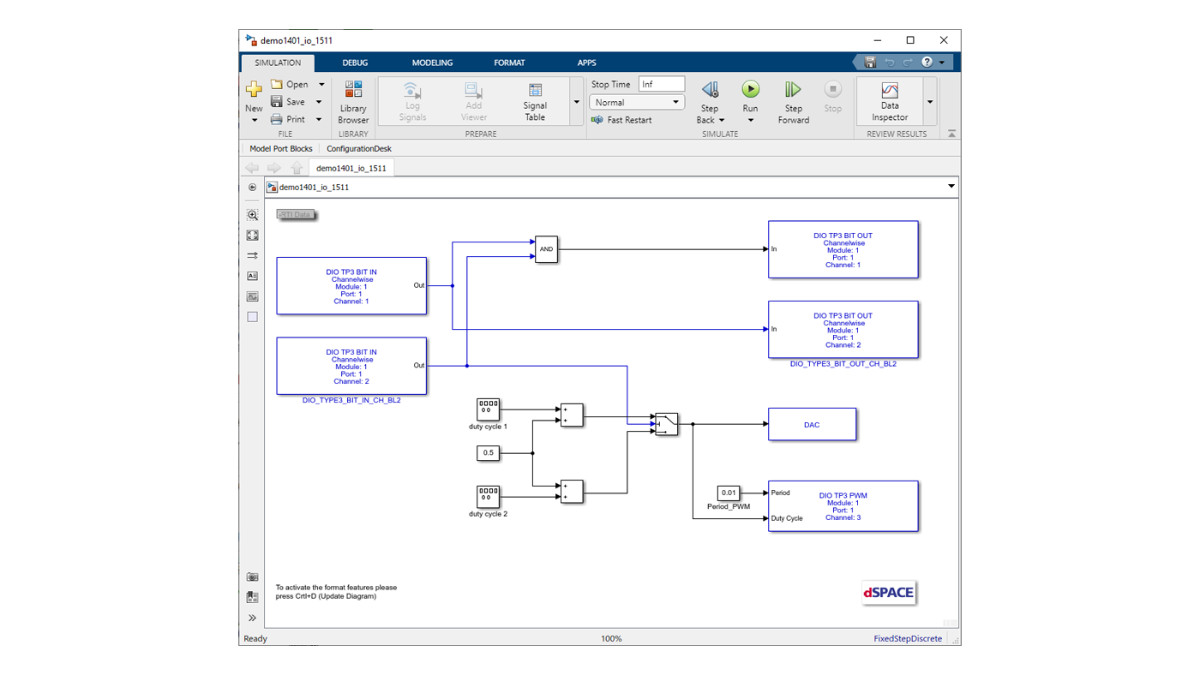
그래픽 I/O 구성
Simulink에서 모델 테스트를 마쳤으면 실시간 하드웨어에서 구현할 수 있도록 준비해야 합니다. 플랜트 모델은 실제 제어 시스템에 대한 인터페이스를 형성하는 I/O 블록으로 대체됩니다. I/O 모델을 추가하려면 RTI I/O 라이브러리로부터 모델로 블록을 끌어 컨트롤러의 I/O에 연결하기만 하면 됩니다.
매개변수 사양
I/O 매개변수는 I/O 블록을 두 번 클릭하고 데이터를 그래픽 사용자 인터페이스에 입력하여 지정합니다. 이 예에서, 입력 신호는 피드백 값 및 기준 신호입니다. 기준 신호는 이제 외부 신호 발생기에서 나와 ADC 블록에 의해 판독됩니다. 컨트롤러로부터의 출력 신호는 DAC 블록을 통해 하드웨어에 의해 출력되는 제어 신호 u_M입니다.
dSPACE 하드웨어 구현
dSPACE 하드웨어에서 Simulink 모델의 자동 구현은 신속한 설계 반복의 핵심입니다. RTI를 사용하면 이 프로세스 동안 한 줄의 코드도 볼 수 없습니다. Build를 한 번 클릭하면 코드 생성, 컴파일 및 다운로드를 포함한 구현이 시작됩니다. Configuration Parameters 대화 상자의 Solver 페이지에서 통합 알고리즘과 스텝 크기를 선택할 수 있습니다. 스크립트를 사용하여 빌드 절차를 자동화할 수도 있습니다. 이는 특히 대형 모델에 유용합니다.
실험 소프트웨어와의 상호작용
애플리케이션이 실시간 하드웨어에서 실행되면 전체 dSPACE 실험 소프트웨어를 마음대로 사용할 수 있습니다. RTI를 사용하면 구현 프로세스 직후 각 개별 변수를 제어할 수 있습니다.
ControlDesk는 코드를 재생성하지 않고도 매개변수를 변경하고 신호를 모니터링할 수 있는 계기판을 제공합니다. 또한 ControlDesk는 애플리케이션에서 사용되는 모든 변수의 시간 기록도 표시합니다.
dSPACE 하드웨어 지원
DS1104 R&D Controller Board, MicroAutoBox II 또는 MicroLabBox와 함께 dSPACE 시스템을 사용하는지 여부에 관계 없이: RTI는 dSPACE 시스템의 편리한 모델 및 I/O 구성을 허용합니다.
|
블록 세트 |
설명 |
자세한 정보 (관련 제품 정보 보기) |
|
멀티 프로세서 시스템용 실시간 인터페이스 |
|
|
|
RTI 바이패스 블록 세트 |
|
|
|
CAN 블록 세트 |
|
|
|
RTI LIN MultiMessage 블록 세트 |
|
|
|
dSPACE FlexRay 구성 패키지 |
|
|
|
RTI FPGA 프로그래밍 블록 세트 |
|
|
|
이더넷 블록 세트 |
|
|
|
RTI 전기 모터 제어 블록 세트 |
|
|
|
RTI DS1552 I/O 확장 블록 세트 |
|
|
|
RTI RapidPro 제어 유닛 블록 세트 |
|
|
|
RTI USB Flight Recorder 블록 세트 |
|
– |
|
RTI Watchdog 블록 세트 |
|
|
|
RTI 동기화된 시간 기반 관리자 블록 세트 |
|
– |
| 기능 | 설명 |
|---|---|
| I/O 구성 |
|
| 실시간 코드 생성 |
|
| 자동 작업 정의 |
|
| 컴파일러 호출 |
|
| 애플리케이션 로드 및 시작 |
|
혁신을 추진하세요. 항상 기술 개발의 동향을 주시해야 합니다.
저희 전문 지식 서비스에 가입하세요. dSPACE의 성공적인 프로젝트 사례를 확인해 보세요. 시뮬레이션 및 검증에 대한 최신 정보를 받아보세요. 지금 바로 dSPACE 다이렉트(뉴스레터)를 구독하세요.