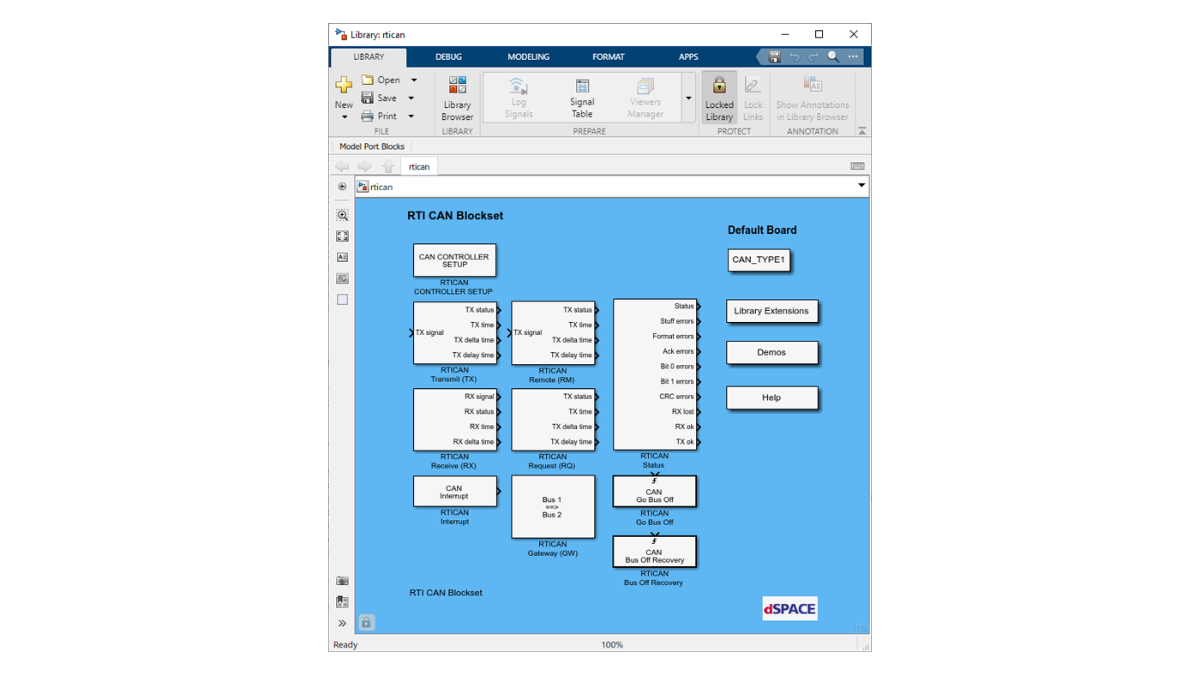
RTI CAN Blockset
Für die Kombination von dSPACE Systemen mit CAN-Kommunikationsnetzwerken
Das RTI CAN Blockset ist besonders zum Entwickeln und Testen von Regelfunktionen geeignet, die über ein CAN-Bussystem kommunizieren.
-
Entwickeln und Testen von Regelfunktionen, die über einen CAN-Bus kommunizieren
-
Import von Datenbankdateien und Zugriff auf CAN-Rohdaten
-
Ein Simulink®-Block für jede Funktionalität und jede Botschaft

Anwendungsbereiche
Das RTI CAN Blockset ist eine Erweiterung zu Real-Time Interface und dient dazu, dSPACE Systeme mit CAN-Kommunikationsnetzwerken zu kombinieren und zu konfigurieren. Das RTI CAN Blockset und das RTI CAN MultiMessage Blockset unterscheiden sich hinsichtlich ihrer Leistungsmerkmale und Anwendungsbereiche.
Vorteile
Das RTI CAN Blockset ist besonders zum Entwickeln und Testen von Regelfunktionen geeignet, die über ein CAN-Bussystem kommunizieren. Um eine Botschaft mit dem RTI CAN Blockset zu erstellen, wählen Sie den geeigneten Block aus der CAN-Blockbibliothek und verbinden ihn mit Ihrem Simulink-Modell. Informationen zur Konfiguration wie Baudrate, Bezeichner, Botschaftenlänge und Interrupts können in Dialogen eingegeben werden.
| Functionality | Description |
|---|---|
| General |
|
| Initialization and configuration |
|
| Signal and message handling |
|
| Interrupts |
|
- Vertrieb Unsere Mitarbeiter im technischen Vertrieb beraten Sie bei der Auswahl Ihres dSPACE Systems. Auch für Preisauskünfte oder Informationen zu weiteren dSPACE Produkten stehen sie Ihnen gerne zur Verfügung.
- Beziehen von dSPACE Software Informationen zum Herunterladen, Installieren und Lizenzieren von dSPACE Software
Treiben Sie Innovationen voran. Immer am Puls der Technologieentwicklung.
Abonnieren Sie unser Expertenwissen. Lernen Sie von erfolgreichen Projektbeispielen. Bleiben Sie auf dem neuesten Stand der Simulation und Validierung. Jetzt dSPACE direct und dSPACE direct aeropace & defense abonnieren.