Real-Time Interface (RTI)
Implementierungssoftware zur Ausführung von Modellen auf dSPACE Hardware
Mit RTI können Sie sich ganz auf den tatsächlichen Entwurfsprozess konzentrieren und Entwurfsiterationen schneller durchführen. RTI erweitert den C-Code-Generator Simulink Coder™ (vormals Real-Time Workshop ® ) und ermöglicht eine durchgängige, automatische Implementierung Ihrer Simulink- und Stateflow-Modelle auf der Echtzeit-Hardware.
- Implementierung von MATLAB ® /Simulink ® / Stateflow ® -Modellen auf dSPACE Hardware
- Automatische Code-Generierung
- Grafische I/O-Konfiguration mit umfangreichen Simulink-Blockbibliotheken

Anwendungsbereiche
Egal ob Rapid Control Prototyping oder Hardware-in-the-Loop-Simulation: Real-Time Interface (RTI) ist die Verbindung zwischen der dSPACE Hardware und der Entwicklungssoftware MATLAB/Simulink/Stateflow von MathWorks ® .
Arbeiten mit RTI
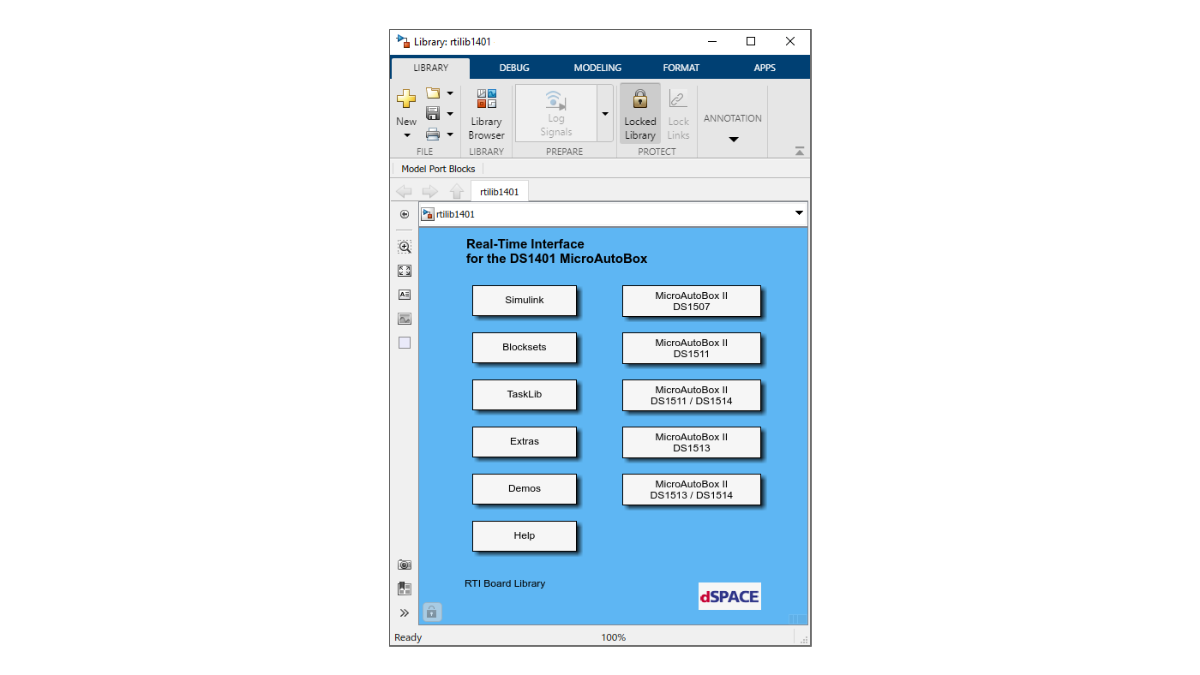
Um Ihr Modell mit einer dSPACE I/O-Karte zu verbinden, müssen Sie einfach nur das I/O-Modul per Drag&Drop aus der RTI-Blockbibliothek mit den Simulink-Blöcken verbinden. Alle Einstellungen, zum Beispiel die Parametrierung, stehen durch einen Klick auf die entsprechenden Blöcke zur Verfügung. Simulink Coder™ (vormals Real-Time Workshop ® ) generiert den Modell-Code, während RTI Blöcke bereitstellt, die die I/O-Funktionalitäten der dSPACE Systeme in Ihren Simulink-Modellen implementieren und so das Modell für die Echtzeitanwendung vorbereiten. Ihr Echtzeitmodell wird automatisch auf Ihrer Echtzeit-Hardware kompiliert, heruntergeladen und gestartet, ohne dass Sie auch nur eine einzige Code-Zeile schreiben müssen. RTI führt Sie durch die Konfiguration. RTI bietet Konsistenzprüfungen, so dass potentielle Fehler bevor und während des Build-Prozesses identifiziert und korrigiert werden können.
Umfangreiche Funktionalitäten
RTI kann mit allen zeitkontinuierlichen, zeitdiskreten und Multirate-Systemen umgehen. Je nach I/O-Hardware können unterschiedliche Kanäle derselben I/O-Karte mit unterschiedlichen Abtastraten und sogar in unterschiedlichen Teilsystemen verwendet werden. RTI unterstützt asynchrone Ereignisse und ermöglicht die Festlegung von Task-Prioritäten und Task-Überlaufstrategien für die Ausführung von Interrupt-gesteuerten Teilsystemen. Zudem unterstützt RTI zeitgesteuerte Tasks und Timetables, mit denen Sie Tasks und Task-Gruppen mit variablen oder vordefinierten Verzögerungstabellen in Beziehung zu einem verbundenen Trigger-Ereignis implementieren können. Dadurch wird das Task-Handling in Ihren Modellen sehr flexibel. Auch bietet RTI Prüfungen, die doppelter Kanalbelegung oder falscher Verwendung von Kanälen vorbeugen.
Vorteile
Mit RTI können Sie sich ganz auf den tatsächlichen Entwurfsprozess konzentrieren und Entwurfsiterationen schneller durchführen. RTI erweitert den C-Code-Generator Simulink Coder™ (vormals Real-Time Workshop ® ) und ermöglicht eine durchgängige, automatische Implementierung Ihrer Simulink- und Stateflow-Modelle auf der Echtzeit-Hardware. Die Implementierungszeit wird deutlich reduziert. RTI führt Sie durch die Hardware-Konfiguration und bietet automatische Konsistenzprüfungen, um Parametrierfehler zu vermeiden. Für maximale Flexibilität unterstützt jede RTI-Version mehrere MATLAB-Releases (siehe www.dspace.com/go/Compatibility). Modelle der letzten MATLAB- und RTI-Versionen werden automatisch migriert, wenn neuere Versionen von RTI verwendet werden.
Modell-Design
In diesem Beispiel wird der geschlossene Regelkreis des Positionierungssystems für ein Festplattenlaufwerk im Blockdiagramm dargestellt. Sowohl der Regler als auch das Regelstreckenmodell werden in einer MATLAB/Simulink-Entwicklungsumgebung entworfen.
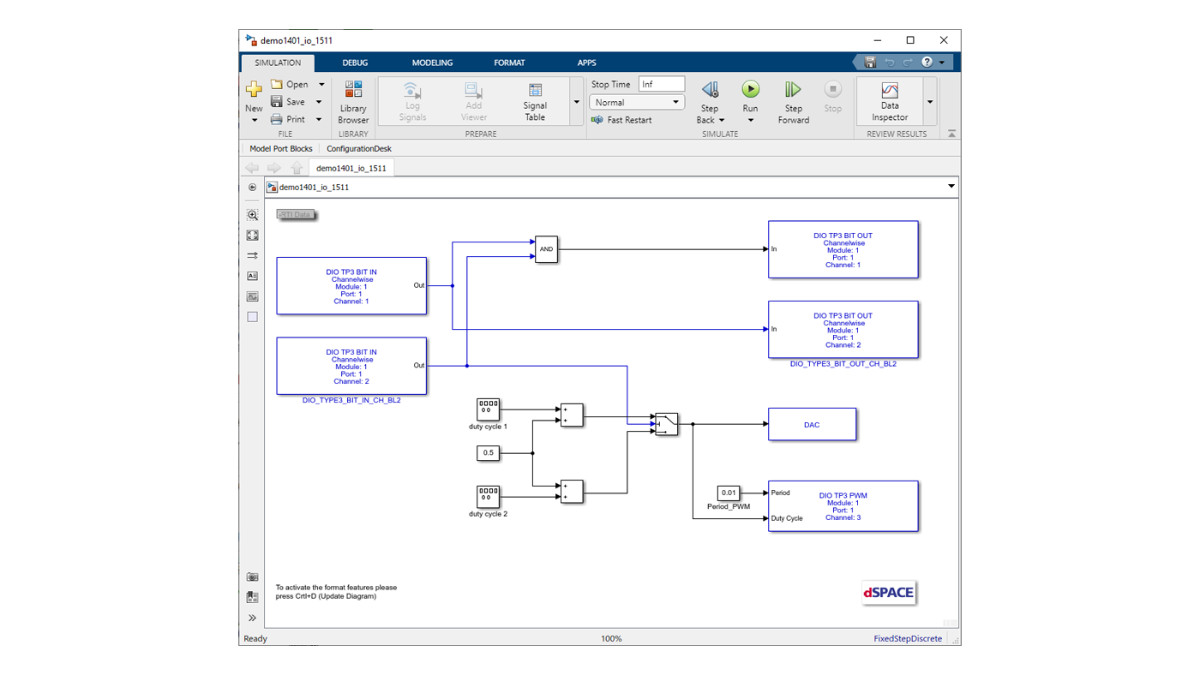
Grafische I/O-Konfiguration
Wenn Sie den Modelltest in Simulink abgeschlossen haben, muss das Modell für die Implementierung auf der Echtzeit-Hardware vorbereitet werden. Das Streckenmodell wird durch I/O-Blöcke ersetzt, die die Schnittstellen zur realen Strecke bilden. Um ein I/O-Modell hinzuzufügen, nehmen Sie einfach einen Block aus der RTI-I/O-Bibliothek und verbinden ihn mit den Ein- und Ausgängen des Reglers.
Parameterspezifikation
I/O-Parameter werden durch Doppelklick auf einen I/O-Block und Dateneingabe in grafischen Benutzeroberflächen spezifiziert. In diesem Beispiel stellen der Feedback-Wert und das Referenzsignal die Eingangssignale dar. Das Referenzsignal kommt von einem externen Signalgenerator und wird von einem ADC-Block gelesen. Das Ausgangssignal des Reglers ist das Ansteuersignal u_M, das von der Hardware über einen DAC-Block ausgegeben wird.
Implementierung auf dSPACE-Hardware
Der Schlüssel zu schnellen Entwurfsiterationen ist die automatische Implementierung des Simulink-Modells auf der dSPACE Hardware. Dank RTI werden Sie während dieses Prozesses mit keiner einzigen Zeile an Code konfrontiert. Die Implementierung wird per Klick auf ‚Build‘ gestartet, einschließlich Code-Generierung, Kompilierung und Download. Sie können einen Integrationsalgorithmus und die Schrittweite auf der Seite ‚Solver’ im Dialog ‚Configuration Parameters’ auswählen. Zudem ist es möglich, Build-Prozesse mit Hilfe von Skripten zu automatisieren. Das ist besonders bei umfangreichen Modellen sehr hilfreich.
Interaktion mit Experiment-Software
Wenn Ihre Anwendung auf der Echtzeit-Hardware ausgeführt wird, steht Ihnen die komplette dSPACE-Experiment-Software zur Verfügung. Durch RTI ist sichergestellt, dass Sie sofort nach der Implementierung jede einzelne Variable steuern können.
ControlDesk verfügt über ein Instrumentenpanel, mit dem Sie Parameter ändern und Signale überwachen können, ohne dass der Code neu generiert werden muss. Zudem zeigt ControlDesk die Zeitschriebe jeder in Ihrer Anwendung vorkommenden Variablen an.
Unterstützende dSPACE Hardware
Ganz gleich, ob Sie dSPACE Systeme mit einem DS1104 R&D Controller Board, einer MicroAutoBox II oder einer MicroLabBox verwenden: RTI ermöglicht die komfortable Modell- und I/O-Konfiguration Ihres dSPACE Systems.
|
Blockset |
Description |
Further Information (See relevant product information) |
|
Real-Time Interface for Multiprocessor Systems |
|
|
|
RTI Bypass Blockset |
|
|
|
CAN Blocksets |
|
|
|
RTI LIN MultiMessage Blockset |
|
|
|
dSPACE FlexRay Configuration Package |
|
|
|
FPGA Programming Blockset |
|
|
|
Ethernet Blocksets |
|
|
|
RTI Electric Motor Control Blockset |
|
|
|
RTI DS1552 I/O Extension Blockset |
|
|
|
RTI RapidPro Control Unit Blockset |
|
|
|
RTI USB Flight Recorder Blockset |
|
– |
|
RTI Watchdog Blockset |
|
|
|
RTI Synchronized Time Base Manager Blockset |
|
– |
| Functionality | Description |
|---|---|
| I/O configuration |
|
| Generating real-time code |
|
| Automatic task definition |
|
| Invoking the compiler |
|
| Loading and starting the application |
|
- Vertrieb Unsere Mitarbeiter im technischen Vertrieb beraten Sie bei der Auswahl Ihres dSPACE Systems. Auch für Preisauskünfte oder Informationen zu weiteren dSPACE Produkten stehen sie Ihnen gerne zur Verfügung.
- Beziehen von dSPACE Software Informationen zum Herunterladen, Installieren und Lizenzieren von dSPACE Software
Treiben Sie Innovationen voran. Immer am Puls der Technologieentwicklung.
Abonnieren Sie unser Expertenwissen. Lernen Sie von erfolgreichen Projektbeispielen. Bleiben Sie auf dem neuesten Stand der Simulation und Validierung. Jetzt dSPACE direct und dSPACE direct aeropace & defense abonnieren.